
夏乙 发自 凹非寺
一提到机器人不听话,人类的反应通常都是“拔电源”。
拔电源就能让它们停下来了?Naive。
最近,加州理工和苏黎世联邦理工学院就联合打造了一款不用电、不需要马达的“自驱动”机器人。
这款机器人依靠一种会随着温度变化而变形的材料,在水中游动。
也许叫机器鱼更合适吧~上面就是它的照骗,是由Tian Chen和Osama R. Bilal制造的渲染图。
这条机器鱼未经美颜的真实照片是这样的:
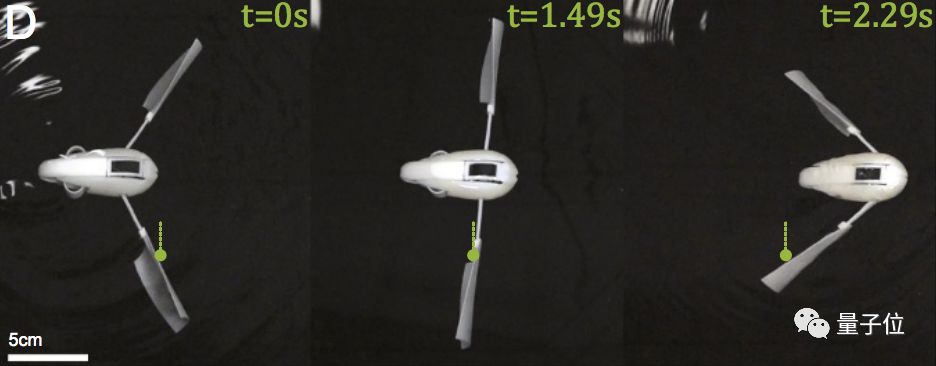
当然,无论有没有美颜,都无法展示出内部的结构。作为一项严谨的科学研究,科学家们还给出了细致的内部解剖图:
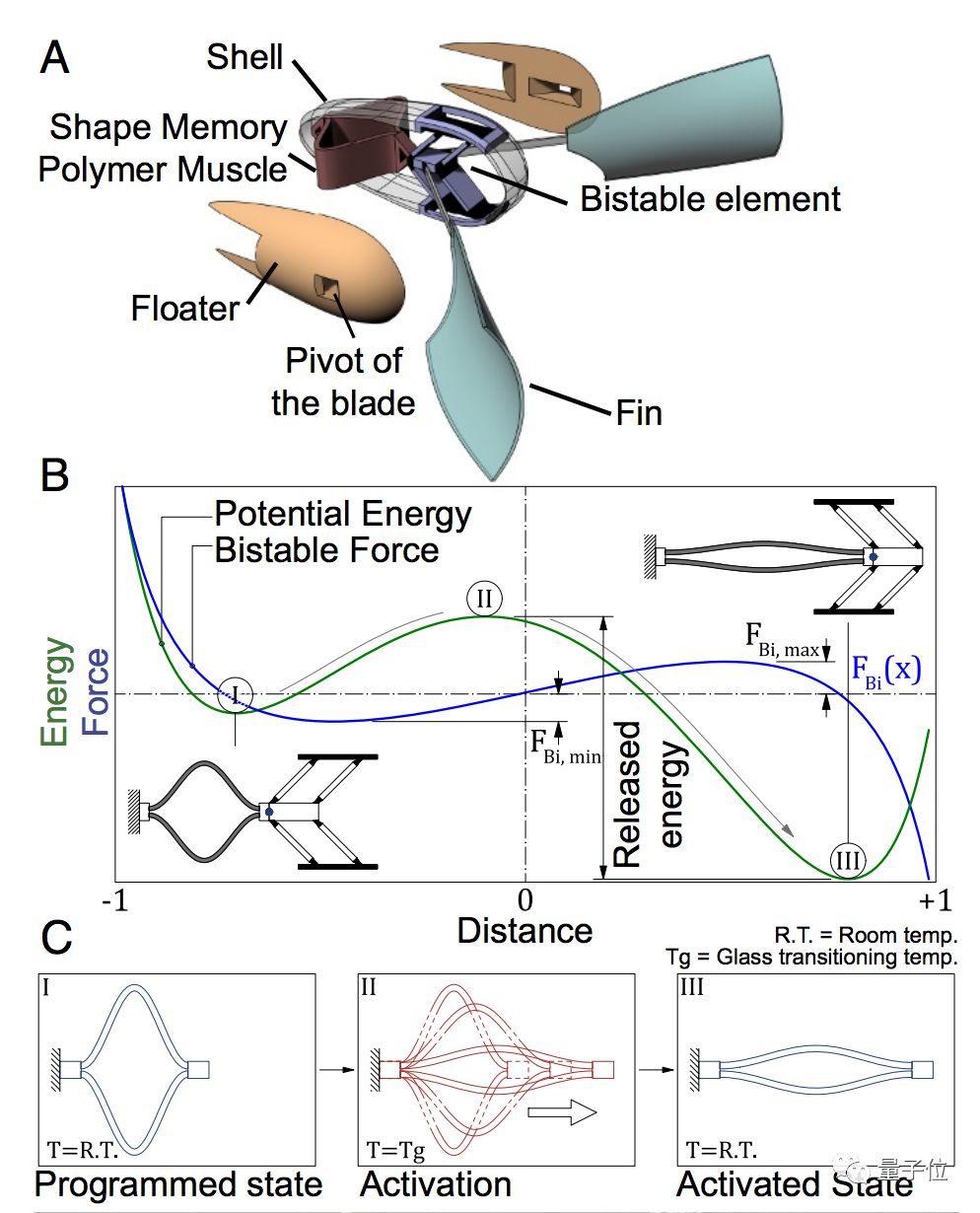
鱼身中有一个通过变形来提供动力的聚合物“肌肉”,包裹在两片低密度的漂浮装置和一层外壳之中。“肌肉”由柔韧的高分子聚合物构成,它们在温度低时呈卷曲状,温度高时就会伸展开。

把一条机器鱼从人类呼吸的冰凉空气中放到温暖的水里,肌肉就会伸展开,然后通过旁边一个连接到“鱼鳍”的小部件,控制鱼鳍的活动,让这条机器鱼在水中游动起来。
就像这样:

不止前进后退。
上面的两鳍版,是这种机器鱼的最简单形态。在这个基础上,科学家们还设计出了三鳍、四鳍版,再对“肌肉”做一些改动,机器鱼就掌握了一些高阶技能,比如——拐弯。
拐弯,需要各个鱼鳍做出不同的活动,也就需要它们连接到各不相同的“肌肉”。参与这项研究的小伙伴们发现,不同粗细的聚合物条热到伸展需要的时间是不一样的,“肌肉”越粗,伸展得越慢。把不同粗细的聚合物条组合到一起,就能控制机器鱼的运动方式了。
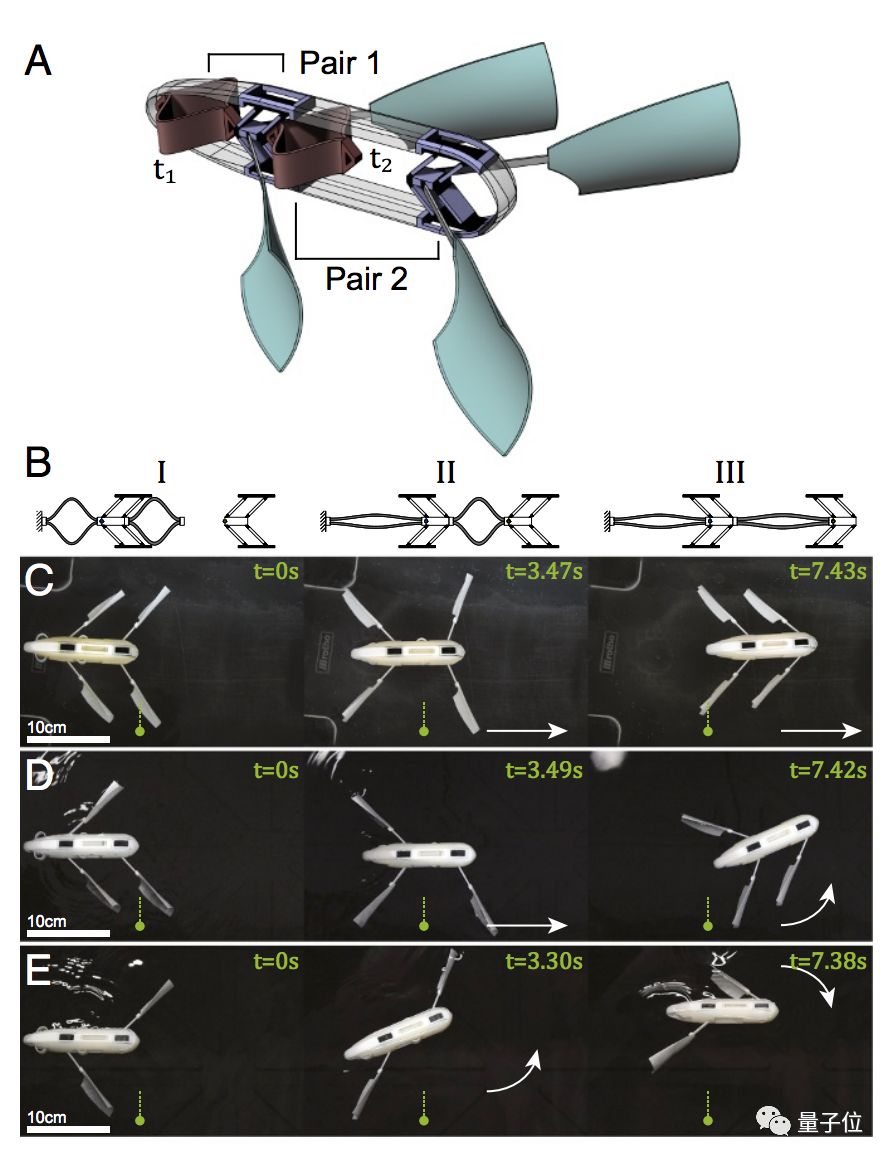
目前,这种机器鱼尚处幼年,掌握的最复杂技能要数这一套:在水中前进→空投一件货物→后退。
前进后退就不说啦,来观赏一下空投:
下面的视频,更加完整地展示了这种机器鱼的能力和原理:
这项研究相关的论文5月15日发表在PNAS《美国国家科学院院刊》上,题为Harnessing bistability for directional propulsion of soft, untethered robots。
项目主页:
https://authors.library.caltech.edu/86403/
作者系网易新闻·网易号“各有态度”签约作者
— 完—返回搜狐,查看更多
责任编辑:










